
Engineers Develop Advanced Robotic Systems to Be Surgeon's Right Hand
San Diego, February 9, 2017 — In the operating room of the future, robots will be an integral part of the surgical team, working alongside human surgeons to make surgeries safer, faster, more precise and more automated. In the lab of electrical engineering professor Michael Yip at the University of California San Diego, engineers are developing advanced robotic systems that could make this vision a reality.
From intelligent algorithms that can enable robots to lend a helping hand during surgery, to “smart” endoscopes that can autonomously maneuver through sensitive nooks and crannies inside the body, the robotics technologies in Yip’s lab are all inspired by a common goal: to augment the capabilities of surgeons.
The goal is not to replace human surgeons, but to better assist and enable them to do much more, Yip said. Human surgeons, he explained, are still needed to make decisions that can’t be left to a robot, such as what treatment is best for the patient, or how a surgical procedure should be performed.
Meanwhile, robots will be made to perform tasks that humans cannot. For example, flexible and dexterous robots armed with high-power computing and sub-millimeter precision will be able to perform minimally invasive surgery, control complex instruments and navigate through spaces in the body that a human surgeon can’t access. These robots could perform other advanced tasks, like creating real-time 3D maps inside the body as they self-navigate, and incorporating all available medical data — including imaging information — into the operating room.
This vision illustrates the idea of “Shared Autonomy,” the theme of the most recent UC San Diego Contextual Robotics Institute Forum that was held in October. In an age of increasing automation, researchers in the Institute, such as Yip, are focused on developing robotic systems that can interact well in a human world and benefit society.
Here’s a sample of some of the projects in Yip’s Advanced Robotics and Controls Laboratory (ARCLab):
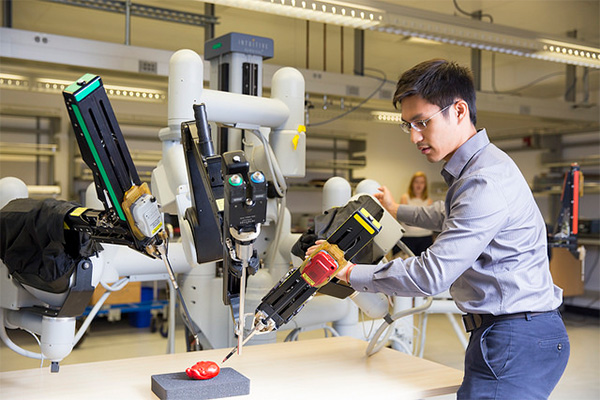
Automated surgical assistant: da Vinci robot
The da Vinci Surgical System is a robotic surgical system designed to perform minimally invasive surgery. The system, developed by the company Intuitive Surgical, is remotely controlled by a surgeon from a console. The system is equipped with four robotic arms, but a surgeon is able to control only two of them at a time. Yip’s ARCLab currently has a full da Vinci Surgical System dedicated for research in shared autonomy.

Yip’s team aims to put the other two arms to work. To do this, they are creating software and hardware that will enable these arms to function autonomously. A goal is to have these robotic arms assist the primary surgeon with routine surgical tasks (suction, irrigation or pulling tissue back) that are tedious and are currently performed by additional human surgeons.
“This would reduce the number of surgeons in the operating room, which would reduce the overall cost of the surgery,” said Nikhil Das, an electrical engineering Ph.D. student in Yip’s lab. It would also free up surgeons who normally do these tasks to see other patients, he added.
Das develops motion planning algorithms that will enable the auxiliary arms to move without hitting obstacles, such as the surgeon-controlled manipulator arms. He is working on this project with undergraduate student Naman Gupta, who is visiting from Birla Institute of Technology and Science in Pilani, India. Gupta implements these algorithms in a simulated da Vinci system’s robotic arm and is in the process of validating his approach before moving it onto the ARCLab’s da Vinci system.
Other students in the ARCLab are incorporating haptics into the system so that surgeons operating the robotic arms can recover the textures and sensations of feeling the tissues, a critical sensation missing in current systems.
“We’re trying to close the gap between the surgeon and the robot,” Das said.

Steerable catheters
To reach truly small scales, the ARCLab is developing its own robotic catheters. These catheters are meter-long, millimeter-diameter flexible robots that can access the deepest parts of the body from atraumatic locations such as the leg. With 8 wires that are individually controlled by 8 different motors, Yip’s lab can shape and steer the robot catheters in more complex configurations and navigate far more effectively than surgeons could do manually.
One goal is to automate the catheter and incorporate haptic controls so that the operator can receive feedback from the motors. “That’s what makes our catheter different from the steerable catheters in industry,” said Aaron Gunn, a mechanical engineering undergraduate working on this project.
Artificial muscles
For robots to move with more agility and speed, they’ll need human-like muscles. To that end, postdoctoral researcher Jun Zhang and bioengineering undergraduate Taylor West are making artificial muscle fibers that can quickly contract and relax while holding weight.
undergrad Taylor West in ARC Lab
The muscle fibers are made of silver-coated nylon threads that are spun into a tightly coiled structure. When voltage is applied to the fibers, they heat up and contract. As they cool, they relax back to their original length. By braiding multiple coiled fibers together, researchers can create a stronger muscle that can lift a heavier load.
The artificial muscles that Zhang and West built can achieve up to 20 percent contraction while lifting a one kilogram load (see video below). For comparison, existing artificial muscles can achieve 5 percent contraction at best. They also contract slower and are made of expensive metal nanomaterials. “Ours are much cheaper because we use regular sewing thread,” West said.
Researchers aim to use these artificial muscles to build life-like robotic arms, prosthetics, orthotics and robotic augmentation devices for people with poor muscle function. “And we can make devices that are lightweight and smaller using these artificial muscles,” Zhang said.
West, whose father served in the military, has a soft spot for wounded veterans and aspires to become a prosthetics engineer. These interests drew her to the ARCLab. “My hope is that this research will produce technology that will help people and is affordable,” West said.
Editor's Note: For more information, contact ECE Prof. Michael Yip at yip@ucsd.edu.
Related Links
Advanced Robotics and Controls Laboratory
Contextual Robotics Institute
Video: Catheter Robot Distal Motions
Video: Edited Grasp
Electrical and Computer Engineering
Media Contacts
Liezel Labios, (858) 246-1124, llabios@ucsd.edu